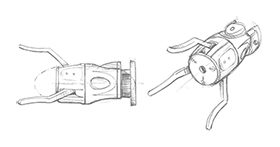
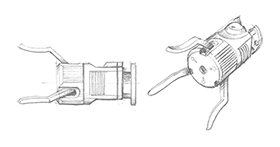
Exterior Design of Electric 3-Finger Robot Hand – ARH350A
The ARH350A combines the hand, motor, and controller into a unified whole, utilizing a servo system with stepping motors. This system provides precise gripping force, speed, and positional control.
It’s a product that achieves “the right grip for various objects.”




製品開発に関するご相談はアークまで
お問い合わせはこちらから