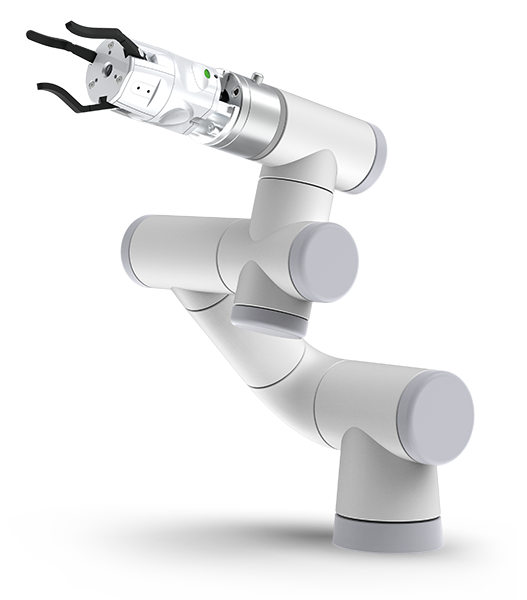
ARH350A
ハンド+モータ+コントローラーが一体となっており ステッピングモータを用いたサーボシステムによる 把持力・動作速度・位置制御が可能です。
“ しっかりと、いろんなものに、ちょうどいい。 ”を 実現した製品です。
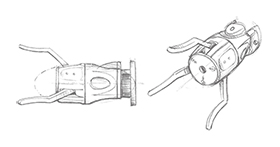
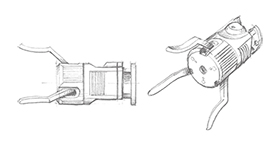
キースケッチ
Mobility / friendly
ラグビーボール型の機動力と曲線を多用した優しさ
Legacy / Future
シンプルな円柱形を継承した未来感
デザイナーの想い
ロボットハンドは様々な用途やカタチが存在し これからも多様性や特化を繰り返しながら進化していくと考えられます
人との協働 + 先進性
人に合わせて有機的な形に寄せると奇怪に感じたり 無機的にまとめると機械感が増し、ただの部品となってしまう・・
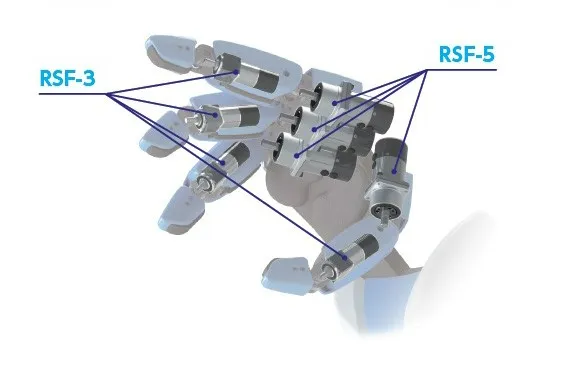
そこで ロボットとして精密感やスピード感での頼もしさを持ち 人との協業では親しみやすさを狙い、 持った感触も意識したカタチを目指しました
またティーチングの際、モータ部を持って操作するため 手の形状に合わせた掴みやすさでユーザビリティを追求 製造方法や取り付け方も考慮したデザインで 本来はデザインのみの依頼でしたが、外装設計の受注にもつながっています
アイデアごとのカラーリング提案
製品開発に関する課題などがございましたらお気軽にご相談ください