

AGV(自動誘導式搬送車) Automated Guided Vehicle |
AMR(自律型モバイルロボット) Autonomous Mobile Robot |
|
|---|---|---|
 |
 |
|
操作方法 |
予め設定されたルートを辿るため、固定的な作業エリア内での運用が一般的です。プログラムに基づいて自律的に動作します。 |
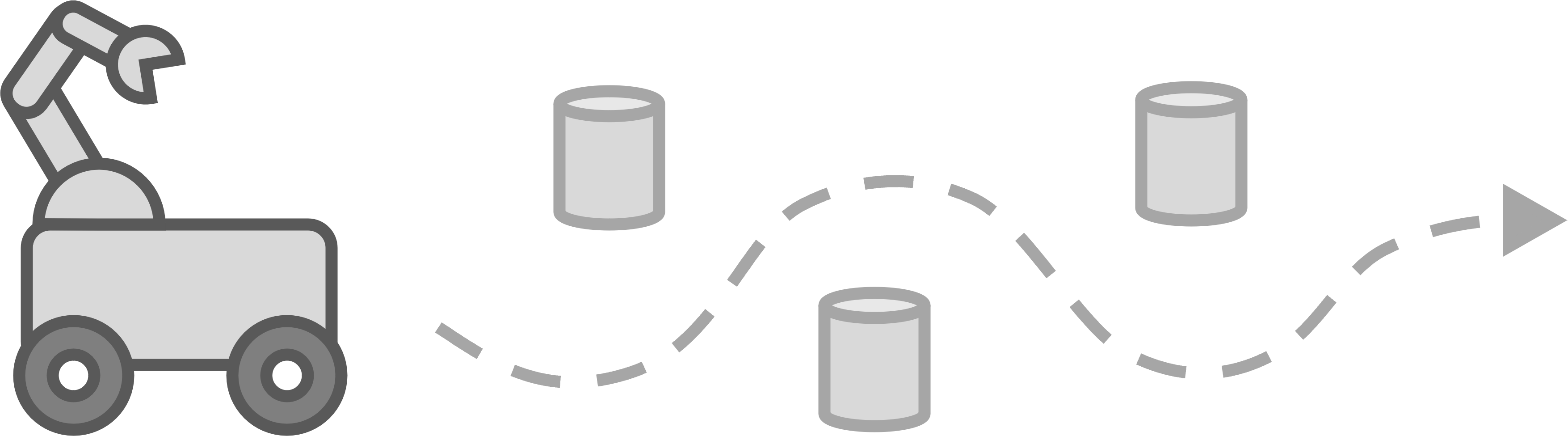
自己位置推定やマッピング技術を利用して、自律的に移動します。環境を認識し、障害物を回避することができます。柔軟な作業エリアでの運用が可能です。 |
ルート設定 |
予め設定された専用のガイドレールや磁気テープ、マーカーなどを基に、正確に動作します。 |
環境を認識し、自律的に最適なルートを選択します。ルート変更や環境の変化にも柔軟に対応することができます。 |
形状と用途 |
一般的には車輪を備えた台車のような形状をしており、パレットやコンテナの搬送など、比較的大型で重い物品の移動に適しています。 |
小型の移動台車やロボットアームを備えた形状をしており、より細かい作業や複雑なタスクに適しています。例えば、個別の製品のピッキングや組立作業など。 |
柔軟性 |
専用のガイドレールや磁気テープを敷き詰める必要があり、変更が困難です。より予測可能な環境での運用が適しています。 |
環境の変化やタスクの変更に柔軟に対応することができます。環境への適応性が高く、幅広い作業に使用することができます。 |
 |
 |
|
障害物回避能力 |
基本的に障害物を検知せず、ルート上に障害物があると停止する。 |
障害物を検知し、回避しながら移動が可能。 |
形状 |
車輪付き台車型が主流で、大型。 |
小型でロボットアームを備えたものもあり、よりコンパクト。 |
運用エリア |
固定的な作業エリアに限定されることが多い。 |
柔軟な作業エリアでの運用が可能。 |
導入コスト |
比較的低い。 |
高度な技術を必要とするため、AGVよりもコストが高い。 |













製品開発に関するご相談はアークまで
お問い合わせはこちらから