リハビリテーションロボット
リハビリテーションロボットは、医療分野で使用されるロボット技術の一つです。主にリハビリテーションプロセスを支援するために設計されています。リハビリテーションロボットは、患者の運動機能の回復や向上を促すために使用されます。
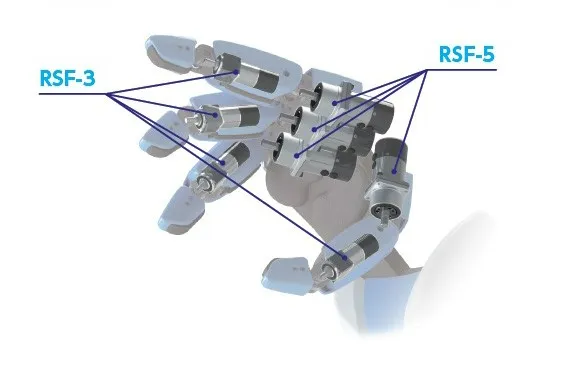
リハビリテーションロボットには、患者の運動を補助・制御するためのアクチュエータやセンサー、制御システムが組み込まれています。これらのロボットは、特定の部位や運動の補助・強化を行ったり、運動パターンを記録・分析することで、リハビリテーションの効果を最大化します。
例えば、脳卒中後の患者の手の機能回復を支援するための手首の可動域を訓練するロボットや、下肢リハビリテーションをサポートする歩行補助ロボットなどがあります。リハビリテーションロボットは、患者の個々のニーズや状態に合わせて適切なリハビリテーションプログラムを提供し、リハビリテーションの効果的な支援を行うことができます。