


点検ロボットは、自動化された機械装置で、建物や施設などの点検作業を行うために設計されています。点検ロボットは、人間が危険な場所や高所に登る必要がなくなるため、安全性が向上します。また、点検ロボットはカメラやセンサーを使用して、建物や施設の状態を詳細に調査し、問題や欠陥を検出することができます。このような技術の進歩により、効率的で安全な点検作業が可能となっています。

建築業界
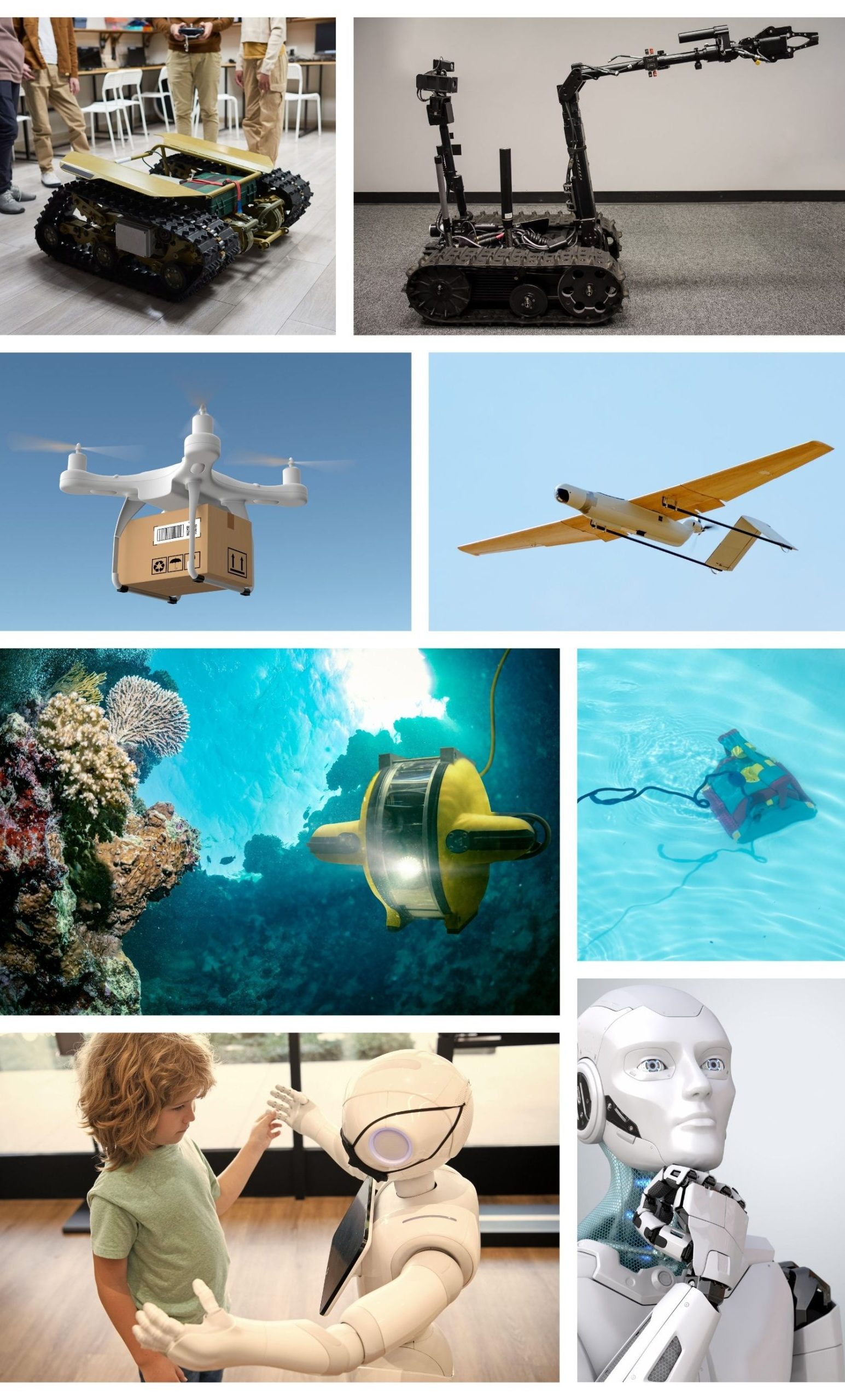
建物や構造物の点検に活用されます。高所や狭いスペースなど、人間がアクセスしにくい場所での点検作業を効率化し、安全性を向上させます。

エネルギー産業
原子力発電所や風力発電所などのエネルギー設備の点検や保守作業に活用されます。放射線の影響を受ける環境や高温の箇所など、危険な環境での作業をロボットが担当します。

海洋産業
海底パイプラインや油田プラットフォームなどの海洋設備の点検や修復作業に活用されます。水深の深い場所や海洋生物の生息する環境でも活動できます。

航空機産業
航空機の点検や整備作業に使用されます。機体の外部やエンジンの内部など、細かい箇所の点検やデータ収集を効率的に行います。

災害対応
災害現場での救助活動や瓦礫の撤去作業に活用されます。危険な環境下での捜索や救助を行うために、点検ロボットが活躍します。






搬送ロボット

搬送ロボットとは?ARRKで手掛けたコンセプトロボットや、AGVとAMRの違いなども紹介しています。
アシストロボット

企業だけでなく個人でも利用が身近になったアシストロボットについて紹介しています。
リハビリテーションロボット

人手不足が進む中、今後さらに需要の高まりが予想されるリハビリテーションロボットを紹介します。
